GNSS Rover Profile
Main Menu | Connect | Edit Profile
The GNSS Configuration for your rover unit is accessed from the Instrument Selection screen by selecting GNSS Rover as the Instrument Type, then pressing the Edit button to configure your selected GNSS Rover Profile.
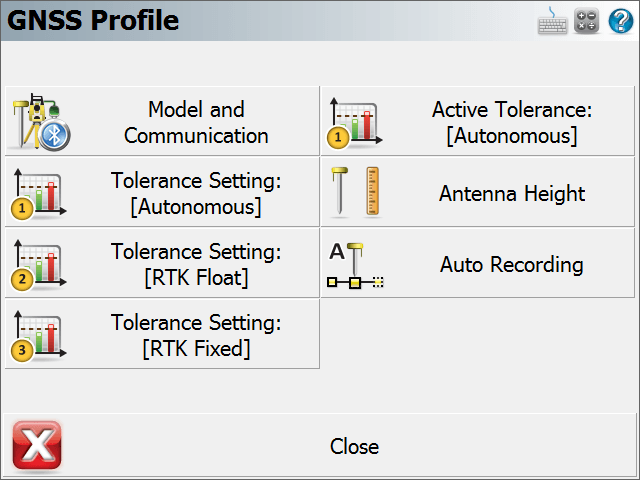
Model and Communication
This is used to select the Make and Model of receiver, and the port settings that the data collector will connect with. Please see the GNSS Model and Communication topic for more information.
Tolerance Setting: [Description] (x3)
The three configurable tolerance modes are used to enter information used in computing the position of the rover once a measurement has begun. Please see the GNSS Tolerance Modes (Rover) topic for more information.
Active Tolerance: [Description]
This displays the current tolerance mode, which can be changed at any time during your survey by selecting the GNSS Settings button in the GNSS toolbar. Please see the GNSS Tolerance Modes (Rover) topic for more information
Antenna Height
The antenna settings are used to calculate or enter the height of the antenna phase center above the ground. Please see the GNSS Antenna Configuration topic for more information.
Auto Recording
The Auto Recording settings are used for collecting data in a "Kinematic" mode. The receiver can automatically log a point every X distance or Y seconds. The user simply selects what option they prefer to use for logging Kinematic data and start the survey. Keep in mind while collecting data at higher velocities that FieldGenius receives position updates from the GNSS at a maximum rate of once per second.