GNSS Settings
|
|
The GNSS Settings screen is accessed from the GNSS Toolbar. |

Sensor Configure
This will allow you to make changes to most of the settings in your reference or rover profile, including configuring the three tolerance modes, selecting the active tolerance mode, configuring the antenna height, configuring the auto-recording options and depending on the GNSS Sensor connected, the Electronic Bubble settings will be shown here as well. (The Model and Communication options cannot be configured while you are connected to your GNSS receiver.)

Depth Sounder
The Depth sounder option allows the program to connect by Bluetooth to a supported depth sounder sensor after you are connected to a GNSS receiver. The program supports the SonarMite BTX depth sounder and other depth sounders that support the NMEA depth sounder standard format. The NMEA format supports either the $xxDBT or $xxDPT messages, depending on what your instrument outputs. On the depth sounder set the port to Bluetooth and the Press to Setup button. Search and select the depth sounder Bluetooth device from the list and configure the Bluetooth connection per the manufacturers instructions (pin code may be required). Once you have selected the correct depth sounder Bluetooth device select Connect.

Once connected to the Depth Sounder you can select the auto reconnect option to reconnect to the sensor if communication is interrupted. With Bluetooth communication established you can select the device model as SonarMite or NMEA depending on the type of depth sounder device you are using. The units of measure for the depth sounder are the same as the GNSS receiver. If the Use water level box is not checked than the height recorded by the program is a combination of the GNSS receiver position plus the antenna height and the depth sounder measurement. The antenna height needs to be input as the distance between the measure point on the GNSS Receiver and the measure point on the depth sounder. If the water level elevation is checked then the user needs to input the water level and the antenna height needs to be set as the distance from the water surface to the measure point on the depth sounder. The GNSS receiver will record the horizontal location and the height will be the water level plus antenna height and depth sounder measurement.


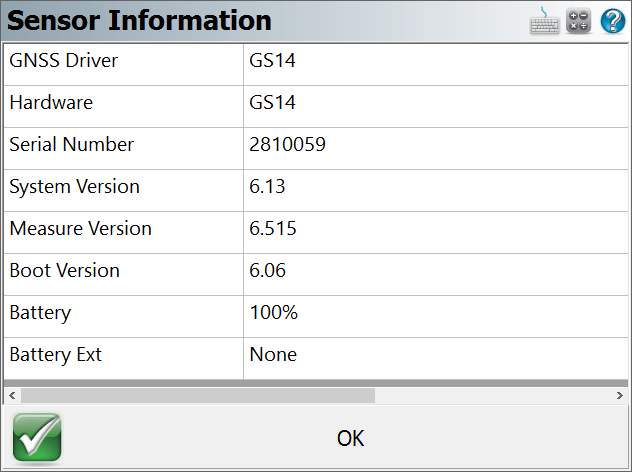
Sensor Information
The Sensor Information screen displays detailed information about the hardware you are connected to.
Link Configure
This turns on your GNSS Receiver's radio or modem to begin receiving RTK corrections, from either a base receiver or an NTRIP or GPRS server.

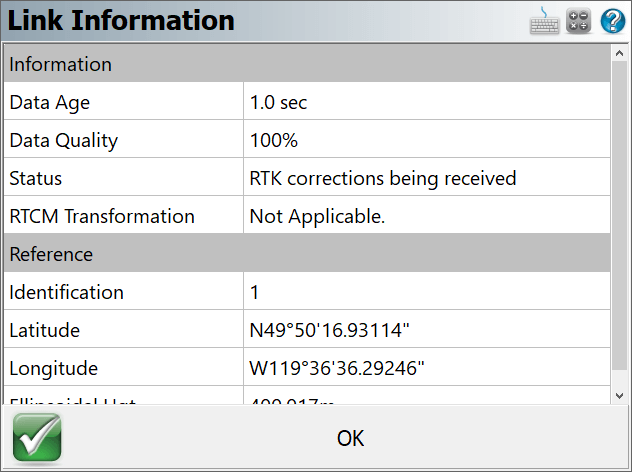
Link Information
The Link Information screen displays detailed real-time information about the correction message being received by your receiver via a radio link from a base receiver, or via a cellular modem link from an NTRIP or GPRS server.
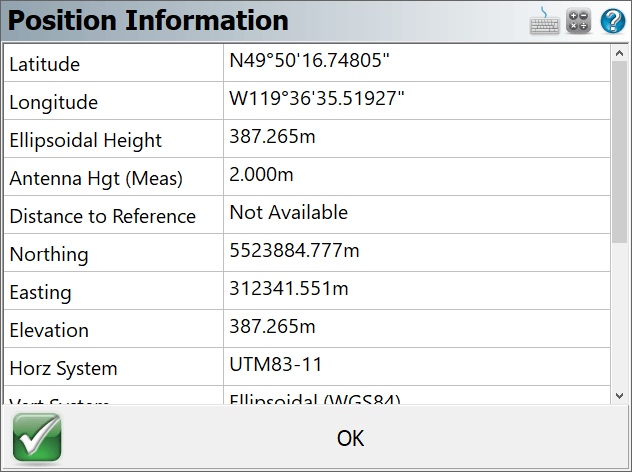
Position Information
The Position Information screen displays detailed real-time information about your current position.
Antenna Height
The Antenna Height screen allows you to configure the antenna height of your GNSS receiver.

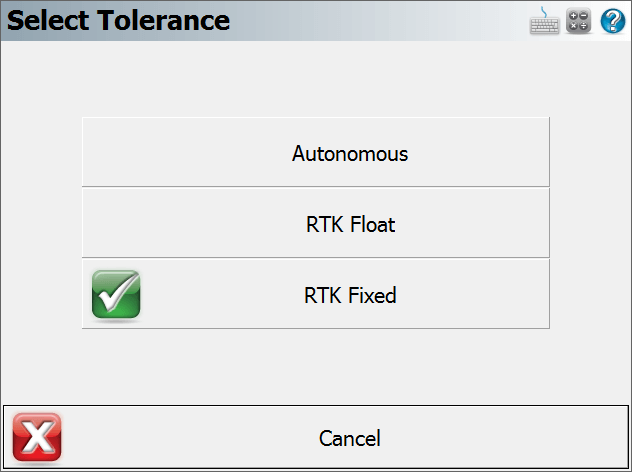
Active Tolerance Mode
This button indicates which of the three tolerance modes setup in your Rover Profile is currently being used. Press this button to select the active tolerance mode. To configure the three tolerance modes, see the "Sensor Configure" button described above.
Raw Data Logging
The Raw Data Logging screen is used to start and stop raw data logging on your GNSS reference or rover receiver, for later post-processing.

Reset RTK Filters
Use this to reset the RTK solution in your receiver, to force it to recalculate a new solution and resolve any ambiguities again from scratch. This has the same effect as inverting your receiver to reset the solution.
Select Mount Point
Use this to select a different mount point from the NTRIP caster you are currently connected to.
Instrument Disconnect
Use this to disconnect from your receiver. If you are connected to a reference receiver, corrections will continue to be transmitted after you disconnect.